简介
LIO-SAM 的完整注释代码以及流程图见 LIO-SAM With Chinese Comments
整体思路
在整个 LIO-SAM 框架中,会发布两类里程计信息,每一类里程计又包含高频和低频两种:
- 基于增量信息的里程计:这个里程计不会考虑回环检测,只会进行局部的匹配,这样可以保持轨迹的平滑性
- 基于全局信息的里程计:这个里程计会进行回环检测,因此轨迹在某些地方可能不会很平滑,但总体而言精度会高于基于增量的里程计
每一类里程计分为以下两类:
- IMU 里程计:频率和 IMU 消息频率一致,主要利用惯导信息进行状态解算获得位姿
- Lidar 里程计:频率和 Lidar 消息频率一致,主要方法是将点云和局部地图匹配获得位姿变化信息
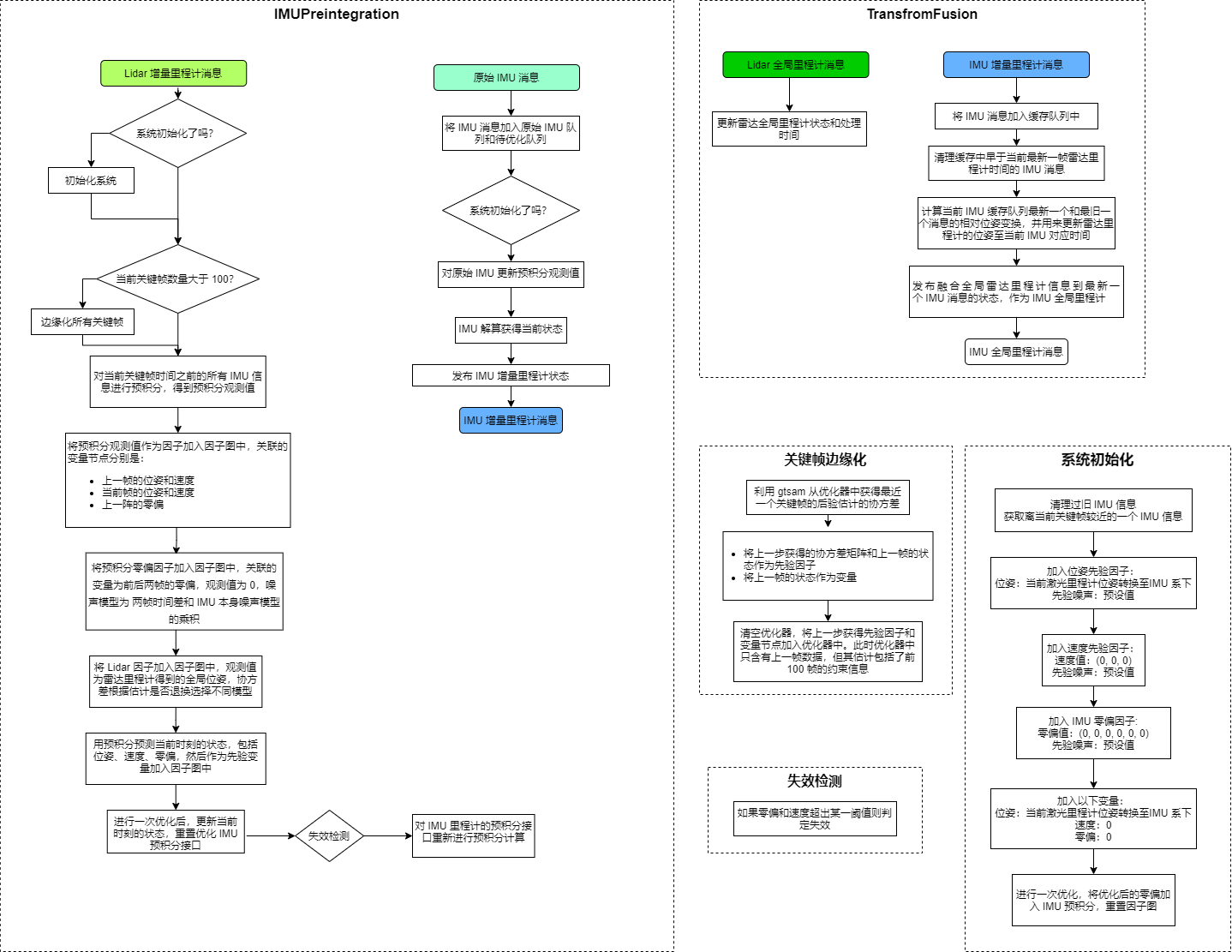
imuPreintegration.cpp 中主要包含两个类,分别是 IMUPreintegration 和 TransformFusion。其作用分别为:
IMUPreintegration- 维护一个因子图,每接收一个 Lidar 增量里程计消息进行一次更新以及优化
- 变量为每一个 Lidar 关键帧的状态(包括位姿、速度以及 IMU 零偏)
- 因子包括 Lidar 增量里程计对每一帧的状态估计作为先验因子,以及每两帧之间的预积分观测作为约束因子,对两时刻之间的零偏也进行了约束
- 作为惯性导航里程计,利用 IMU 信息进行位姿解算,获得基于增量信息的高频 IMU 里程计估计
- 维护一个因子图,每接收一个 Lidar 增量里程计消息进行一次更新以及优化
TransformFusion- 接收 Lidar 全局里程计消息和高频 IMU 增量里程计估计,用 Lidar 里程计消息时刻到最新 IMU 里程计消息时刻的相对位姿变换来更新 Lidar 全局里程计的预测,作为基于全局信息的高频 IMU 里程计估计,频率和 IMU 频率一致
整体的代码逻辑可以参考下图:
IMUPreintegration 类
IMUPreintegration 类的整体思路参考下图:
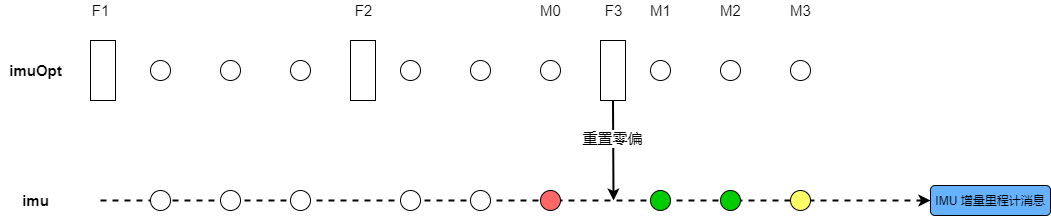
例子中我们假设 FX 是从地图优化节点传来的基于增量信息的 Lidar 里程计消息,MX 是 IMU 测量值。其中接收 F3 时,缓存队列中已经包括 M1 和 M2。M3 则是最新一个 IMU 测量值。
接收 IMU 消息放入两个缓存队列中,分别为:imuOpt 和 imu。其中:
imu队列被直接用于计算状态解算,每当收到一个新的 IMU 测量值M3,会将其加入缓存队列中,并利用优化后的上一个 Lidar关键帧附近的 IMU 状态 (这里的例子是M0)以及队列中所有的 IMU 测量值(M1,M2,M3)进行积分得到当前时刻 IMU 状态。这里注意,由于接收F3时,M1,M2已经在队列里,因此实际上对M1,M2的积分在那个时刻已经完成。imuOpt中的测量值会被用于和进行优化:IMUPreintegration类中维护一个因子图优化器,每当接收一个新的基于增量的 Lidar 里程计位姿F3时,首先会计算F2到F3时刻之间的 IMU 测量值的预积分。然后利用惯性导航解算预测F3时刻(F3左边的 IMU 测量值)对应的状态估计作为该变量节点的初始值,并且构造两个与其相关的约束因子,其中一个是来自F3的基于增量信息的 Lidar 里程计的位姿估计作为先验因子,另一个就是F2到F3之间 IMU 预积分的约束因子。接下来进行一次优化,这次优化会将F3之前所有 IMU 时刻对应的状态进行优化,包括位姿、速度以及零偏。在完成优化之后,需要对imu中的测量值重新计算预积分,因此重置imu预积分器中的零偏并清空状态,从M1开始进行积分到M2。此时imu积分器中更新到M2对应的状态。
TransformFusion 类
这个类的思路比较简单,接收来自后端的基于全局信息的 Lidar 里程计 L 和 IMUPreintegration 类基于增量的 imu 里程计消息 I。这里作者想要做的就是发布一个基于全局信息(含回环)的,但同时又是高频的里程计。因此思路很简单,利用 L 对应时刻的 imu 里程计消息到最新一个 imu 里程计消息的相对位姿变换,并用其作用 L 即可。实现思路参考上面流程图和代码注释。